前言——物理模型与物理实体
很多人都说不存在等效光圈概念,从无忌的老法师,到一些摄影媒体圈的编辑,对等效光圈概念嗤之以鼻的貌似不少。而有意思的是他们又无一例外的对“等效焦距”这一概念表示全盘接受。
实际上,别说等效光圈了,就连“光圈”这个概念,都是摄影术发明一百多年之后才出现的。光圈也被称为“相对口径”,其实按今天的语言习惯也可以被称为等效口径,要按照某些人的逻辑,孔径就是孔径,是几毫米就是几毫米,怎么还能相对、等效呢?各种“等效”概念的出现,说白了都是为了方便,只要效果相等即可,至于它们本质上是否相同并不重要。
等效焦距的本质是视角等效,然而为什么我们要讲等效焦距,而不说等效视角,虽然后者似乎看起来似乎更合乎“物理本质”?很简单,我现在给一个视角50度的全幅镜头装在截幅机上,请问当前的视角是多少?再假设你用50度的镜头拍出来的东西太小,请问你要改用视角多少的镜头才能把主体在画面上的尺寸变大两倍?这类问题你能在3秒钟之内报出答案吗?焦距和等效焦距这个体系用起来就是比视角要方便,我直接加减乘除说等效 xx 毫米就行了,你非要绕个弯子强调“等效焦距根本就不存在,只是相当于全幅 xx 毫米镜头的视角”,说真的除了展现你比别人懂得更多(事实往往刚好相反)以外就没什么卵用了。
根本原因是等效焦距概念解决了“三角函数(正切)对于一般人来说不容易快速计算”这个问题。本质上还是一种数学工具。
所谓等效光圈也是同理,当然不是说镜头的光圈值真的改变了,而是在画幅不同的情况下,等效光圈给了我们相等的效果,提供了跨画幅比较的便利工具。这里的效果,指的是景深、弱光性能以及同结构下的分辨率等。每个人在买镜头的时候之所以要看最大光圈值,也正是为了获得这些光学性能。很不幸,如果你把实际光圈值当成衡量这些性能的标杆的话,你将会错得离谱。
仔细说来,等效焦距也是为了衡量比较不同画幅机身在搭配相同物理焦距镜头时的视角,在这方面二者是一致的。
所以无论是等效光圈,还是等效焦距,都是一种便于处理问题的物理模型而已。如果你非要较真说不存在这样的物理实体,那么也是呵呵哒。
等效光圈的结论(一)——景深等效
首先简单介绍一下景深的物理定义:
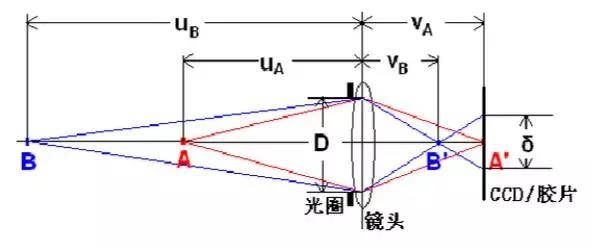
理论上来说,只有位于某一特定平面的点光源(下图点A)所发散出的光线才可以被理想镜头在底片上重新还原为一个点(A')。偏离点A所在平面的点光源(B)将汇聚在另一平面上(B'),导致其在底片上形成一个光斑,也就是所谓的弥散圆(Circle of Confusion)。
B点离A点越远,则弥散圈越大,大到一定程度后B点便被虚化。A点前后能清晰成像(弥散圆直径小于一定值)的范围被称为景深。
用简单的中学几何知识很容易算出弥散圆直径(称为C):
 (很明显由B'点分开的左右两个蓝色三角形相似)。其中D为光阑的物理直径,即D=f/F(焦距/光圈F值)。
(很明显由B'点分开的左右两个蓝色三角形相似)。其中D为光阑的物理直径,即D=f/F(焦距/光圈F值)。
根据高斯公式1/u+1/v=1/f(1/像距+1/物距=1/焦距),代入上式得到:
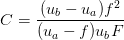
因为一般来说Ua>>f(物距远大于焦距在非微距摄影当中都基本成立),故公式可以简化为:
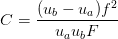
设有大小不同的两块底,大底的边长是小底的x倍,很明显此时根据等效焦距关系有:(此时应该保证Ua、Ub都相等,因为必须同构图,讨论才有意义)

所以我们得出了一个结论:对于同构图、同摄距、同光圈f/值的不同画幅系统来说,画幅对角线长度为1/x的小底,其弥散圆直径是大底的1/x^2。
不过并没有完。实际有意义的值不是弥散圆的绝对大小,而是弥散圆的直径与传感器边长之比(假设大小底的像素相同),所以用△Cx表示弥散圆的相对大小的话,有:
所以小底相机在使用同样的光圈f值的情况下,其实际有效弥散圆直径只有大底相机的1/x。为了补偿这一差距,小底相机需要将光圈开大x倍,xF这个数值,就是景深这里的等效光圈。其折算倍率等于焦距折算倍率,也即传感器的边长之比。
例:D7100要获得和D610相同的景深,在D610使用36mm/f2.0的时候D7100就需要使用24mm f/1.33。此时构图(视角)是一样的。这时候我们就可以说D7100上这支24/1.33镜头的等效焦距是36mm(视角等效),等效光圈是f/2.0(景深等效)。
而用实际光圈计算景深,对于不同画幅来说,算出来的结果显然没有参考价值。
还有两个小的推论:
1、实际景深其实与焦距、画幅、光圈f/值都无关,可以认为只取决于光圈的实际口径(f/F)和对焦距离。(这里有个前提是Ub>>Ua,一般需要虚化的场景都可以满足)
2、等效光圈决定景深,等效焦距除以等效光圈决定远景虚化能力。
等效光圈的结论(二)——弱光性能等效
之前那一个版本在这里写得不是很明白,于是这一块重写一下,换一种更为科学与量化的解释方式。
在这里我们给系统的弱光性能下一个定义:弱光性能指的是在同样的快门速度和出图亮度下图片的信噪比表现。
在讨论弱光性能之前,我们先来认识一下影响弱光性能的主要因素——传感器输出噪声的来源。
一:非均匀响应 Pixel Non-Uniformity Response
即CMOS制造过程中的物理误差,导致各个像素存在不一样的零输入响应。这个因素决定的是理想传感器的信噪比上限。
PNUR在CMOS总噪声中的含量一般小于1%,可以忽略不计。
二:散粒噪声 Shot Noise
是CMOS器件最主要的噪声,主要是由光的量子特性产生的——无论CMOS工艺再精进,也无法避免这一块噪声。
懂一点量子力学的同学可能都知道薛定谔方程的解|ψ|对应的是一种概率波,也就是说,你知道时间t内大概会接收到1000个光子,但你无法确定一定会接收到1000个,可能是998,也可能1002。自然界的本性如此。
从统计物理上讲,散粒噪声的强度是信号强度的平方根,信号越大则噪声越大,但是信噪比也在提高,对成像而言噪声的绝对强度并不重要,重要的是信噪比。
值得强调的是,对散粒噪声而言,重要的是整块CMOS接收到的光量,而不是单个像素接收到的光量。因此高像素机型通过缩图,理论上可以获得和低像素机型完全一致的信噪比。
一个简单的例子:假设相机A只有一个像素,其信号S=40000,N=200,其单个像素信噪比为SNR=200=46dB。假设相机B有四个像素,则在相同的条件下其信号S=40000/4=10000,N=100,其单个像素信噪比为SNR=100=40dB。现在我们对相机B的四个像素缩图到一个像素:

SNR=ST/NT=200,两者完全一致。
所以别迷信低像素好么亲。
当然这里也存在一个问题,就是像素的受光率不是100%,像素和像素之间会有被浪费的面积。但随着现在无缝微棱透镜技术的铺开普及,这个问题实际上已经没那么重要了。现在在产的相机几乎都已经搭载了无间隙微透镜技术,具有类似的集光效率,其实都可以看作是同代技术或者都视为理想传感器——包括被大家嗤之以鼻的佳能祖传老汤底。
最后,对于散粒噪声,我们不加证明的给出以下结论:
散粒噪声的表现和相机的原始分辨率无关,只和出图的分辨率有关。出图分辨率每上升一倍,信噪比损失3dB。
(所以这个宇宙中就不可能存在又极高信噪比又极高分辨率的相机,不是钱的问题,也不是地球科技的问题。)
三:读取与传输噪声 Read&Transfer Noise
电路噪声中除了第一条的PNUR(SN主要是光的内禀特性),剩下的基本就是读取噪声,或者叫读出噪声了。
一般传感器的成像流程是传感器捕捉到光子——转化为电信号——放大(提高ISO)——数模转换(ADC)——后端数据处理。在这里我们假设放大器的放大倍数(增益比)为A,以放大器为界把系统分开,前端的所有噪声设为Nf,后端的所有噪声设为Nb,那么整个系统满足以下关系:

于是到了这里,我们得到了一个十分诡,但又确实符合模拟电路原理的结论:
ISO越高(增益A越大)的情况下,后端噪声Nb对于SNR的影响越小。
这一条可以用来解释为什么佳能老汤底在低感条件下动态范围落后,而高ISO下却能混个差不多的水平。有没有片上ADC,对于传输噪声的影响可谓天壤之别。
可能有人会提问了,你说相机在高ISO下输出的图片主要的噪声来源是Shot Noise,那为什么我用眼睛在暗光条件下看,从来没有看到过这些花花绿绿的噪声?
人类看照片时对影调变化最敏感的亮度是18%,偏离18%越多你就越看不清楚——在现实中信噪比低即意味着环境黑暗,环境黑暗意味着人眼自动降低分辨率,从而看不到散粒噪声。而相机把本来非常黑暗的地方用各种放大手段强行提亮,只有这种情况下人眼才能看到相机记录下的散粒噪声。仔细回忆一下自己在黑暗中视物,是不是可见的清晰度比白天大为降低,而不是像相机拍摄的那样,在保留细节的同时多了好多噪点?所以我说现代图像传感器的性能早就已经可以秒人眼,这真不是在开玩笑的。人眼“看起来”很厉害主要是靠脑放,至于视网膜(这也是块传说中的辣鸡小底)和光学系统的性能,那真是四个字——

在等效光圈这里起作用的主要就是散粒噪声Shot Noise——因为理想传感器的PNUR=0,而传输噪声在高感下的影响其实微乎其微(毕竟佳能老汤底也可以跑一个不错的高ISO动态成绩出来)。而散粒噪声实际上只跟整块传感器接受到的光量有关系(在光电转换效率相当的情况下,而这个参数实际上各款传感器差别并不是很大——全幅里最垃圾的A7也有大概40%的光电转换率,而且这款相机已经趋于淘汰了。最好的D5也只有60%左右,其他相机都在这个区间之内,这也就意味着传感器个体之间的差异远小于画幅所带来的差异)。
我们看上面的结论:散粒噪声的信噪比和通光量的平方根成正比;通光量可以认为正比于光圈的通光面积和传感器受光面积的乘积,而传感器面积又正比于对角线长度的平方、光圈的通光面积正比于光圈的孔径,所以我们可以认为(在快门速度相等的前提下):
散粒噪声的信噪比正比于光圈孔径和传感器对角线长度的乘积。
而同样的物理焦距、同样的实际f/值下光圈孔径是一个定值,所以最后的结论就变成了:
在使用同一支镜头,设为同样的光圈f/值的条件下,散粒噪声的信噪比正比于传感器的对角线长度。
这也正好就是等效光圈的结论。
(也就是说小底的低ISO和大底的高ISO理论上来说可以实现完全一样的效果,ISO本身就是一种为了曝光方便而制定的人为标准,希望这个标准本身不会对读者理解等效光圈原理造成阻碍。)
后记
1、等效光圈的计算方法与等效焦距相同,都是“物理光圈(焦距)值×传感器的Crop Factor(转换倍率)。”比如APS-C画幅(转换倍率1.5x)上的23mm f/2.0镜头,其实际的视角、景深和弱光性能等价于全画幅机身上的35mm f/3.0镜头。
2、等效光圈原理之所以得罪人就是它在理论上证明了小底烂画质这个被翻来覆去说了无数次的真理——当然单纯的底大也不一定就是王道,受限于镜头的规格,目前数码相机里底最大的645全画幅系统并没有最大的等效光圈值,毕竟135画幅什么20/1.4、50/1.2、85/1.2之类的镜头都是Bug,目前来看135全画幅依然占据着等效光圈的最大值,也就意味着它具有最好的虚化能力和弱光性能(尤其是拍银河这种硬碰硬吃弱光的环境,跟135画幅的20/1.4、24/1.4之类的相比,645画幅的大光圈广角镜几乎是空白)。
3、等效光圈原理的本质:视角一致、快门速度相等、输出总像素相同的前提下如果两个理想系统输出的景深和信噪比相同,那么它们具有相等的镜头绝对口径。说白了,决定这一切的都是通光量……
暂无评论,快来添加评论哦